I have a triangle in my game, that flies around the screen (like a space ship)
I am trying to determine collisions for that triangle based on whether or not the lines intersect.
However, I am using OpenGL, so when I rotate this triangle, all I do is make a call to glRotatef(); and it rotates, so I never have to calculate the x,y coordinates. BUT for a line collision check, I need to know the x,y coordinates of all the lines in my triangle.
my triangle is called user
user.x is the x coordinate of the center of the triangle
user.y is the y coordinate of the center of the triangle
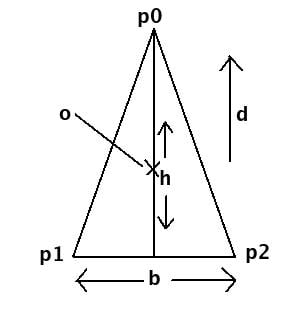
user.dir is the direction that the ship is facing
i need to find 3 points: x1,y1, x2,y2, x3,y3
How would I do that?